آموزش آنلاین – درایو های سروو دلتا – قسمت ششم – آموزش استفاده از اسکوپ و تیونینگ با استفاده از نرم افزار ASDA-Soft
فهرست مباحث مطرح شده در این قسمت – آموزش استفاده از اسکوپ و تیونینگ سروو موتور دلتا با استفاده از نرم افزار ASDA-Soft :
- تعیین مد کنترلی سروو درایو
- تعریف نوع استاندارد (پروتکل) ارتباطی
- تعریف توابع ورودی دیجیتال
- استفاده از شبیه سازی کنترل ورودی های دیجیتال جهت راه اندازی سروو موتور دلتا
- آموزش استفاده از اسکوپ در نرم افزار جهت تیونینگ سروو درایو دلتا
- آموزش تیونینگ سروو درایو دلتا با استفاده از نرم افزار ASDA-Soft
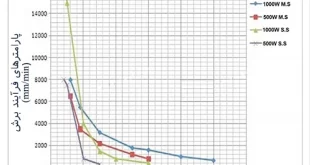
- تاثیر پهنای باند در کنترل و تیونینگ سروو دلتا
اگر قصد خرید سروو موتور دلتا دارید با ما تماس بگیرید.
شما را به تماشای قسمت ششم از آموزشهای آنلاین درایو های سروو دلتا – در زمینه آموزش استفاده از اسکوپ و تیونینگ با استفاده از نرم افزار ASDA-Soft دعوت می کنیم :
آموزش آنلاین – درایو های سروو دلتا – قسمت ششم – راهنمای تیونینگ
تصاویری از محتوای آموزشی درایو های سروو دلتا – آموزش استفاده از اسکوپ و تیونینگ با استفاده از نرم افزار ASDA-Soft :

تغییر پارامترهای درایو از روی پنل
تعیین مد کنترلی سروو درایو از روی دفترچه راهنما

استفاده از جاگ کنترل جهت تعریف ورودیهای دیجیتال و پارامترها

استفاده از شبیه سازی کنترل ورودی های دیجیتال جهت راه اندازی سروو موتور
آموزش استفاده از اسکوپ در نرم افزار
آموزش تیونینگ با استفاده از نرم افزار
قسمتهای دیگر این آموزش را می توانید در این لینک مشاهده فرمائید
آنچه در قسمت ششم دوره آموزشی درایوهای سروو دلتا – آموزش استفاده از اسکوپ و تیونینگ با استفاده از نرم افزار ASDA-Soft ، مشاهده خواهید کرد :
تعیین مد کنترلی سروو درایو
پس اکنون تنها کاری که انجام خواهیم داد
این است که به جلو برویم
پس فقط به من اجازه دهید تا
صفحه را برای شما تغییر دهم
در حال حاضر
کاری که ما باید انجام دهیم این است که باید بدانیم
که درایو سروو چه نوع فرمانی را تشخیص می دهد
یا برخی از روندهای ارسالی یا هر چیز دیگری، فرامین را ارسال نماییم
بنابراین در آن صورت، کاری که ما باید انجام دهیم
این است که باید
بدانیم کدام حالت عملکردی را داریم
که باید برای درایو سروو تنظیم کنیم
بنابراین برای آن می توانید ببینید که
اگر به فصل شش برویم
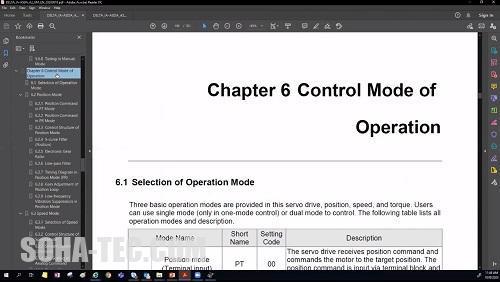
در اینجا مود کنترل عملکرد را داریم
بنابراین برای مود کنترل عملکرد می توانیم
ببینیم که مودهای مختلفی وجود دارد
و ما آنها را در دسته های موقعیت
گشتاور و سرعت دسته بندی کرده ایم
بنابراین، کدهای متفاوتی برای هریک وجود دارد
02 ، 01 ، 00
تعریف نوع استاندارد (پروتکل) ارتباطی
و همچنین ما برای نوع ارتباط
CANopen و اینکه ارتباط برای
است EtherCAT یا برای
برای نمایش
من حالت کار را در حالت سرعت بدون ورودی آنالوگ، قرار می دهم
و سپس دو ورودی دیجیتال داخلی را برای کار
به عنوان سوئیچ تعریف می کنم
11 ، 01 ، 10
و 00 که حالت برد غیرفعال است
من سه وضعیت دارم
سپس با سه وضعیت میتوانم
سه مجموعه فرمان سرعت را تنظیم می کنم
و سپس میخواهم این
دو ورودی دیجیتال را راهاندازی کنم
برای دیدن اینکه آیا موتور
مطابق با دستور تنظیم سرعت کار می کند
بنابراین اولین کاری که باید انجام دهم این است
را تغییر دهم (Operetion Mode) که باید حالت
P1-01 خوب پس حالت کار در اینجاست
تنظیم ورودی حالت کنترل و فرمان کنترل
خوب پس ابتدا باید آن را
روی 4 تنظیم کنم
و همانطور که قبلاً گفتم می توانید ببینید
که می گوید
لطفاً سروو را مجدداً راه اندازی کنید
تا تنظیمات جدید فعال شود
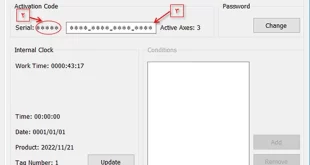
نوع پارامترهای قابل تعریف
برای تمام این پارامترها در داخل
درایو سروو انواع مختلفی وجود دارد
و برای هرنوع از آنها
آیکون های مختلف در جلو آنها قرار گرفته است
و در اینجا می توانید ببینید
است (Read-Only) که این یکی فقط خواندنی
تنها زمانی می توان آن را تنظیم کرد که سروو خاموش باشد
معتبر پس از روشن شدن مجدد
پارامتر فرار
یا شاید هم پارامتر برای سه محور
نیست A2M که برای
نیاز دارم (Repower-ON)
خوب، صدای خاموش شدن
سوییچ را باید بشنوید
لطفا درایو سروو را خاموش و مجدد روشن کنید
سپس در این مورد، اگر روی سلول
مقابل این پارامترها کلیک کنید
این رفتار ، مشابه همان رفتاری است که اینجا
خوب اگر روی آن کلیک کنم
میبینیم که الان چهار می باشد
تعریف توابع ورودی دیجیتال
و سپس تنها کاری که باید انجام دهم این است که باید
دو ورودی دیجیتال را به عنوان سوئیچ اختصاص دهم
بنابراین اگر به دفترچه راهنمای کاربر برگردم
و چون باید بدانم کدام کد تابع را
برای ورودی های دیجیتال نیاز دارم
بنابراین به جدول 8.1 برگردید
و سپس سوئیچ ها
برای ورودی های دیجیتال
این 14 و 15 است
بنابراین به این معنی است که اگر من دو ورودی
دیجیتال را در کد تابع به عنوان 14 و 15 تنظیم کنم
و سپس اگر وضعیت را مانند
1 0 – اینجا 1 0
یا 1 1 تغییر دهم، سپس می توانم اجازه دهم
با تنظیم مجموعه این دستورات توسط
این سه پارامتر اجرا شوند
P1-11 ، P1-10 ، P1-09
بنابراین ابتدا اجازه دهید
از P دستور را تنظیم کنیم، بنابراین
شروع می شود P1-9
بنابراین همانطور که در اینجا می بینید
واحد 0.1 دور در دقیقه است، بنابراین 1000
یعنی سرعت اضافی روی سلول 100 است
پس 2000 یعنی 200 است
اما شاید بخواهم
کمی آنرا تغییر دهم به
عدد 15000 ، یعنی 1500 دور در دقیقه
و سپس برای این یکی آن را به 30000
یعنی 3000 دور در دقیقه
که سرعت نامی است، تغییر می دهم
و سپس می خواهم ورودی دیجیتال را
به عنوان کد تابع اختصاص دهم
بسیار خوب، اما در واقع استفاده
از این و تغییر آن چندان راحت نیست
آموزش استفاده از جاگ کنترل جهت تعریف ورودیهای دیجیتال و پارامترها
بنابراین کاری که میتوانیم انجام
دهیم این است که میتوانیم از این
I/O این کنترل دیجیتال
استفاده کنیم (Digital IO / Jog Control) و جاگ کنترل
فقط روی آن کلیک کنید
اینجا یک یادآوری وجود دارد
کلیک کنید و سپس ok فقط روی
را داریم I/O صفحه راه اندازی
بنابراین ابتدا تنها کاری که باید انجام دهیم این است که
کلیک کنیم (Edit DI/O Item) ما باید روی این
بنابراین ما روی آن کلیک می کنیم و سپس ما
می توانیم تنظیم کنیم
که چه انفاقی بیافتد، زمانیکه ما از آن استفاده می کنیم
پس در این مورد پس از آن من
این را به عنوان ورودی دیجیتال دو تنظیم کنید
بسیار خوب و من آن را به عنوان یک سوئیچ تعریف می کنم
باشد A contact
کلیک کنید OK و روی A contact پس
آره، 15 به عنوان یک سوئیچ دیگر برای ورودی
OK دیجیتال تنظیم می کنم و کلیک بر روی
و حالا ، آن انجام شده
بنابراین آنچه می توانم در مرحله بعدی تغییر دهم
این است که می توانم وضعیت این دو ورودی دیجیتال را
برای راه اندازی موتور، روشن یا خاموش کنم
اما نکته بسیار مهمی که ابتدا
باید انجام دهیم این است که وقتی روی
موتور سروو کار می کنید
Servo Ready , Servo Enable
Motor Ready یا Servo On
به هر حال، ایده این است که
اجازه دهیم درایو سروو جریان را تولید کند
تا کنترل موتور را شروع کند، به طوری که
بتواند، در هر زمان به دستور واکنش نشان دهد
بنابراین اول از همه آنچه که
اکنون باید انجام دهیم این است که باید
استفاده از شبیه سازی کنترل ورودی های دیجیتال جهت راه اندازی سروو موتور
این ورودی های دیجیتال را به صورت مجازی کنترل کنیم
بنابراین باید
تیک این جعبه ها را بزنیم
پس حالا اگر روی این سروو روشن
کلیک کنم (Servo On)
شما باید صدای مغناطیسی را بشنوید
خوب و زمانیکه صدای مغناطیسی را
شنیدید
به این معنی است که موتور در کنترل است
بنابراین اکنون همانطور که می بینید
سروو من روشن نیستم
بنابراین من می توانم این موتور را به راحتی بچرخانم
می بینید که من تظاهر نمی کنم
و واقعا
من نمی توانم این موتور را
خیلی بچرخانم
خوب این به این دلیل است که موتور
در کنترل است
تست عملی
بنابراین کاری که من اکنون انجام می دهم
این است که سروو را روشن میکنم
من این ورودی دیجیتال را برای راه اندازی موتور فعال می کنم
بنابراین اکنون
اجازه دهید دوباره آن را برگردانم و می توانم
این ورودی های دیجیتال را فعال کنم
و سپس موتور با
سرعت متفاوتی اجرا می شود، من فکر
می کنم که شما باید قادر به شنیدن صدای
موتور که در حال چرخش است، باشید
اما می توانید آن را در کنار هم امتحان کنید، بنابراین
اکنون همانطور که می بینید موتور در حال چرخش است
بنابراین اکنون تمام جزئیات ورودی ها را غیرفعال می کنم
تا خاموش شود
پس اکنون یکی را وارد میکنم، سپس در حال حرکت است
این یکی را غیرفعال می کنم و و دیگری را
فعال می کنم و در سرعتی متفاوت اجرا می شود
و سپس
هر دو را فعال می کنم و
و در 3000 دور در دقیقه کار می کند
اما سوال اینجاست که چگونه بفهمیم که
سرعتی که انتظار داشتیم می چرخد؟
آموزش استفاده از اسکوپ در نرم افزار
خوب سپس
در اینجا اسکوپ (نوسان نما) نرم افزار ما
بسیار مفید خواهد بود
بنابراین در این مورد می توانید ببینید که
در اینجا یک تابع اسکوپ داریم
خوب اینجا ما یک تابع اسکوپ داریم
ما می توانیم روی آن کلیک کنیم و شما می توانید ببینید
ما چهار کانال داریم
پس کانال یک و کانال سه یکی هستند
و دو و چهار یک مجموعه هستند
هر مجموعه 32 بیت است، بنابراین اگر روی
تیک 32 بیت بزنیم
یکی دیگر غیرفعال می شود
پس من می توانم انتخاب کنم
دو تا 16 بیتی یا یک 32 بیتی
و در اینجا برخی از داده ها وجود دارند که باید مانیتور شوند
پس فقط تا زمانی از 32 بیت استفاده خواهید کرد
که ما شرایط را نظارت می کنیم
در غیر این صورت فقط
می توانیم از 16 بیت استفاده کنیم و کافی می باشد
برای موقعیت نیازمند 32 بیت می باشیم
در غیر این صورت ریست می شود
خوب پس اولین چیزی که من می خواهم
مانیتور فرمان سرعت است
و سپس همچنین من می خواهم نظارت کنم
بر سرعت موتور، خوب ، در اینجا
و سپس من همچنین می خواهم
ببینم که
تغییر می کنند DI آیا آنها مطابق با وضعیت
باشه پس آخری که انجام نمی دهم و
و سپس
من فقط اسکوپ را اجرا می کنم
سپس به عقب برمی گردم و سعی می کنم فقط
به صورت تصادفی آنرا راه اندازی کنم
بسیار خوب، من فقط به طور تصادفی راه اندازی می کنم
و سپس به اسکوپ باز می گردم
آن را متوقف میکنم و
سپس سیگنالی که بر آن را مانیتور می کردم را دریافت خواهم کرد
تعریف پارامترهای نظارتی در اسکوپ
بنابراین برای این سیگنال مقیاس
هنوز تنظیم نشده است، بنابراین کاری که می توانیم انجام دهیم این است که
می توانیم روی این آیکون
سبز کلیک کنیم
ما می توانیم تمام داده ها
را در صفحه نمایش دهیم
و حداکثر و حداقل مقدار را
به طور خودکار تنظیم کنیم
خوب، یک نفر روی آن کلیک کند
گفتنش راحت تر خواهد شد
بکشیم و رها) کنیم) drag&drop و سپس می توانیم روی آن کلیک کرده و
سپس می توانیم منطقه ای که می خواهیم
بررسی کنیم، را بزرگنمایی کنیم
اما در اینجا در نمای کلی خواهیم دید
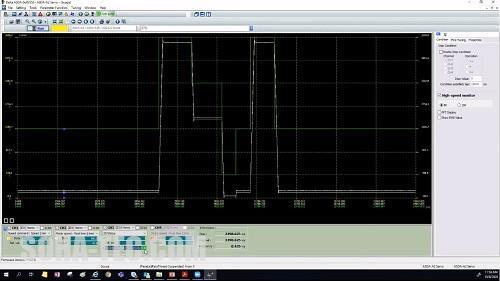
بنابراین برای رنگ زرد این فرمان
از درایو سروو
و رنگ سفید فرمان
واقعی موتور است
رنگ سبز وضعیت است، که شما می توانید در آن
ورودی دیجیتال یک دو سه چهار را ببینید
که در این بخش، زمانیکه سروو روشن است
Servo ON
بررسی فرمان و بازخورد موتور و درایو سروو
فقط اولین ورودی دیجیتال روشن است و
سپس فقط آنرا می توانید به عنوان دلیل این امر
ببینید، و سپس می بینید که سرعت باید 100 باشد
و سرعت واقعی نیز حدود 100 است
اگر ما هر دو ورودی دیجیتال را فعال کنید
و سپس می توانید سرعت را مشاهده کنید
به 3000 میرسیم
و سپس اگر
یک ورودی دیجیتال را غیرفعال کنم
من فقط یکی را غیر فعال می گذارم
و سپس می توانید ببینید که سرعت خواهد بود
سپس می بینید که سرعت به 1500 تغییر می کند
همچنین سرعت واقعی نیز در حال تغییر است
و سپس با غیرفعال کردن همه آنها
در اینجا ، می توانید ببینید که دیگر
سرعتی وجود ندارد و همچنین موتور
متوقف شده است
و به محض اینکه آن را تغییر دادم
آنگاه حرکت می کند، بنابراین این
یک آزمایش ساده خواهد بود که میتوانیم از
ورودی دیجیتال مجازی
برای راهاندازی موتور استفاده کنیم و می توانیم از اسکوپ استفاده کنیم
تا بررسی کنیم
که آیا رفتار مطابق انتظار است یا خیر
وقتی صحبت از عیب یابی به میان می آید
یا شاید می خواهیم بررسی کنیم که آیا
رفتار مطابق انتظار ما است؟
پارتمترهای اساسی در سروو
آنچه بسیار مهم است دو چیز است
یکی فرمان و یکی بازخورد
و برای فرمان و
بازخورد
موقعیت و سرعت را داریم
بنابر این یکی از آن دادههایی است که میتوانیم توسط آن
سرعت فرمان و سرعت هدف یا بازخورد را بررسی کنیم
و همچنین چیزی که بررسی می کنیم
گاهی اوقات موقعیت فرمان
میزان تکانه کاربر
یا بازخورد موقعیت را بررسی می کنیم
اما در این مورد همانطور که اشاره کردم
از آنجایی که ما در حال نظارت بر موقعیت هستیم
لازم است این 32 بیت را فعال داشته باشیم در غیر
این صورت داده ها بازنشانی خواهند شد
بنابراین ما خطی را که بالا می رود
نخواهیم دید در عوض می بینیم که اینجا
بالا می رود و سپس پایین
و سپس بالا و ریست می شود
بنابراین برای برخی از عیب یابی های اساسی
پس کاری که می توانیم انجام دهیم این است که
می توانیم موقعیت فرمان و بازخورد را بررسی کنیم
و همچنین
فرمان و سرعت بازخورد
آموزش تیونینگ سروو درایو دلتا با استفاده از نرم افزار
و سپس برای تیونینگ
چرا باید تیونینگ را انجام دهیم؟ اساسا تیونینگ
به موتور(درایور سروو) اجازه می دهد که بداند
که بار مکانیسمی که در حال حرکت است، چقدر است؟
زیرا اگر ندانیم شاید سیستم نتواند
مکانیزم را به درستی کنترل کند
پس ممکن است باعث صدای لرزش یا
چیزهای دیگر گردد که برای عملکرد مضر است
بنابراین کاری که میخواهیم انجام دهیم این
است که تیونینگ را با این کار انجام میدهیم
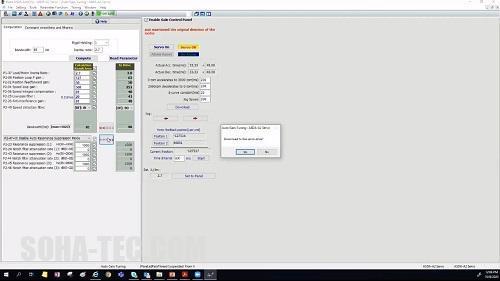
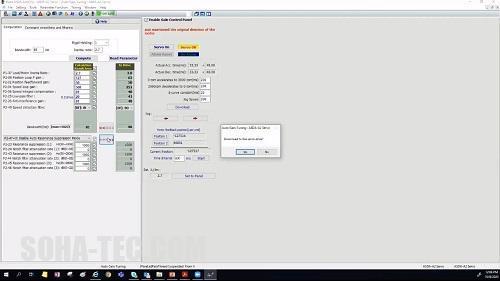
Auto Gain Tuning در اینجا
خوب این یکی که آیکون چرخ دنده دارد
ابتدا روی آن کلیک می کنیم
برای افرادی که تجربه کار با تیونینگ را دارند، شما میتوانید
روالی را که بطور معمول انجام میدهید را دنبال کنید
اما من همچنین آن را به اشتراک می گذارم
که ممکن است از روشی متفاوت در کارگاه ما باشد
ابتدا می توانید ببینید که ما این
نسبت اینرسی و پهنای باند را داریم
بنابراین برای نسبت اینرسی اگر بتوانیم هنگام
اندازه گیری آن را محاسبه کنیم، بهتر خواهد بود
اما اگر نه خوب ما می توانیم یک تخمین بزنیم
مثل اینجا من یک دیسک دارم
شاید ندانم تقریباً بدون بار است
یا شاید
به یک یا دو بار متصل باشد
اما در اینجا شاید
بتوانم فقط با فرض این که دو مورد باشد
و برای پهنای باند
تاثیر پهنای باند در تیونینگ سروو موتور
پهنای باند بالاتر به معنای پاسخگوی بالاست
اما همیشه خوب نیست که بگوییم
که این خیلی زیاد است
و همچنین به خصوص وقتی از آن
مطمئن نیستیم که
چگونه می تواند به دستور پاسخ دهد
به آنها کمکی نمی کند، بنابراین شاید ابتدا آن را
به عنوان یک مقدار پایین تر تنظیم کنم، مثلاً 40
کلیک میکنم Compute سپس روی
پارامترهای داده را کنترل میکنم و
آن را در درایو سروو دانلود میکنم
را فعال می کنم (Enable Gain Control Panel) خوب و سپس من
نیز فعال شود (Servo On) و نیاز دارم تا
را روی 200 تنظیم می کنم (Jog Speed) پس سرعت رانش
نکته
لطفا توجه داشته باشید که سرعت نمی تواند کمتر از 200
باشد در غیر این صورت امکان جابجایی آن وجود ندارد
خوب، پس دانلودش میکنم
سپس از این فلش ها
برای انتقال آن به مکان خاصی استفاده می کنم
تنظیم می کنم (Position 1) و آن را به عنوان موقعیت یک
آن را به موقعیت خاصی برمی گردانم
می دهم (Position 2) و سپس در موقعیت دو قرار
بسیار خوب، اجازه میدهم فاصله زمانی
سپس اجازه می دهم تا شروع به کار کند، شما می توانید
شروع به تغییر می کند
وقتی متوجه شدید که دیگر تغییر زیادی
روی نمی دهد، آن وقت پایدار شده است
سپس کاری که می توانید انجام دهید این است که
آنرا متوقف کنیم
خوب هنوز در حال تغییر است باشه اما من
مدتی صبر می کنم، سپس آنرا متوقف می کنم
و سپس این تخمینی است که من
از درایو سروو دریافت می کنم
آن را روی پانل تنظیم میکنم
و سپس می توانید ببینید که
پهنای باند نیز تنظیم شده است
سینک و هماهنگ می کند
می کنم compute سپس
می کنم download و دوباره آن را
پس این یک پروسه بسیار ابتدایی برای تیونینگ، می باشد
اما آنچه که ما می توانیم فراتر از این
انجام دهیم و
همچنین در کاربرد های واقعی بهتر است که انجام دهیم
این است که ممکن است نیاز به
افزایش سرعت داشته باشیم
تاثیر سرعت در تیونینگ سروو موتور دلتا
بنابراین ما مجبور نیستیم به 3000 یا بیشتر افزایش دهیم
و همچنین واقعاً ضروری نیست که به حداکثر سرعتی
که در کارتان استفاده می شود افزایش دهید
اما بهتر است کمی افزایش دهیم
زیرا در این صورت می توانیم
ناحیه حساس مختص دستگاه را مشخص کنیم
پس شاید این بار آن را
به 700 برسانم
من آن را دانلود می کنم در
همان حالتهای قبل را باقی می گذارم
و بعد شروع به اجرا می کنم
و همچنین می توانید آن را در محل خود امتحان کنید و
می بینید که ممکن است تغییراتی نیز ایجاد
شود، بنابراین فقط کمی به آن فرصت دهید
که شاید چند دقیقه باشد
بعد متوقفش می کنیم
و روی پانل تنظیم می کنیم اکنون می توانید
ببینید که دوباره تغییر کرده است
را انجام می دهیم compute سپس
و به این باز می گردیم
و تایید
بنابراین اساساً ما این چرخه را تکرار خواهیم کرد
خوب ما این چرخه را تکرار می کنیم و سپس
وقتی به سرعت بالاتری می رسیم اما
نسبت اینرسی تغییر چندانی نمی کند
ما می توانیم از نسبت اینرسی استفاده کنیم
و ببینید که می خواهیم پهنای باند را کمی
افزایش دهیم یا کمی پهنای باند را کاهش دهیم
و سپس مقداری را که
در یک سروو دانلود کرده ایم دریافت می کنیم
بنابراین این یک راه ساده
برای تنظیم (تیونینگ) است
بنابراین از آنجایی که پهنای باند
بستگی به این دارد که
بنابراین در شرایط واقعی
بالا بردن دقت تیونینگ
بنابراین اول از همه چیزی که فکر میکنم
که میتوانیم آن را امتحان کنیم این است که
اکنون پهنای باند را روی
یک مقدار بالاتر تنظیم کنیم، که 100 است
Servo on و Compute ، خوب
نه ببخشید در درایو سروو دانلود کردم
سروو را روشن کنید و سپس اجازه دهید صفحه نمایش را به شما نشان دهم
پهنای باند را که روی 100 تنظیم کرده بودم،
و می توانید ببینید که
من واقعا نمی توانم موتور را حرکت دهم
پس حالا اگر
اول سروو را خاموش کنم
حالا سروو خاموش است
و حالا اگر پهنای باند را به 30 تغییر دهم
در آن، را انجام میدهم Download و Compute سپس
و مجدد سروو را روشن می کنم
تاثیر پهنای باند در کنترل سروو موتور
و می بینید که چه اتفاقی می افتد
می توانید ببینید که درایو سروو
هنوز موتور را کنترل می کند
اما من می توانم آن را جابجا کنم
بنابراین اینگونه است که پهنای باند روی
درایو سروو و موتور تأثیر می گذارد
زیرا برای پهنای باند بالاتر به این
معنی است که تابعیت بهتر خواهد بود
بنابراین حتی اگر ما هیچ
فرمانی برای حرکت موتور ندهیم
اما در واقع درایو سروو به موتور
دستور می دهد تا در آن نقطه متوقف شود
در واقع هنوز در حال کنترل موتور می باشد
بنابراین با پهنای باند بالاتر به این معنی است که می تواند
در برابر نیروی خارجی نیز مقاومت بهتری داشته باشد
و به همین دلیل است که وقتی می خواهم
آن را جابجا کنم امکان پذیر نیست
اما اگر پهنای باند را پایین بیاورم
این امکان وجود دارد
ترجمه و زیرنویس فارسی
محصول تیم تولید محتوا مجموعه سهاتک
جهت مشاوره و ارتباط با ما میتوانید از طریق راه های ارتباطی معرفی شده در پایان ویدئو با ما در تماس باشید