آموزش آنلاین – درایوهای سروو دلتا – قسمت اول
فهرست مباحث مطرح شده در قسمت اول – درایوهای سروو دلتا :
- مقدمه
- تعریف
- کاربرد ها
- مزایا
- تعریف انکودر و کاربردها
- تعریف گیربکس و کاربردها
- تجیهزات جانبی مورد نیاز (کابل ها و اتصالات)
- معرفی کلی تجهیزات جانبی اختیاری ( ماژول ورودی و خروجی ، مقاومت اهیا کننده )
- آشنایی با کلیات دستگاه های جانبی بیشتر
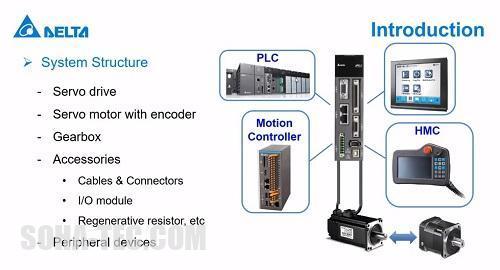
- ساختار سیستم
- تاریخچه محصولات سروو درایوهای دلتا
- معیار اصلی طبقه بندی محصولات سروو (رزولیشن انکودر و توایی پاسخگویی سروو درایو)
- طبقه بندی محصولات سروو درایوهای دلتا
- جدول مشخصات محصولات سروو درایوهای دلتا
آموزش آنلاین – درایوهای سروو دلتا – قسمت اول
تصاویری از فیلم آموزشی

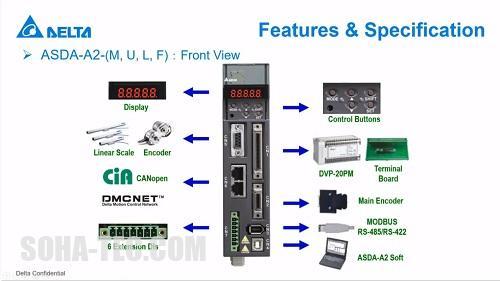
مدلهای سروو درایو معرفی شده توسط کمپانی دلتا
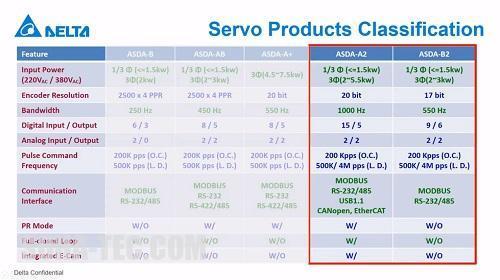
جدول مشخصات سروو درایوهای دلتا
قسمتهای دیگر این آموزش را می توانید در این لینک مشاهده فرمائید
آنچه در قسمت اول دوره آموزشی درایوهای سروو دلتا ، مشاهده خواهید کرد :
مجموعه سها تک، طراح و تولید کننده ماشین های سی ان سی
شما را به دیدین این ویدئو آموزشی دعوت می نماید
برگرفته ازکانال یوتیوب Delta Industrial Automation EMEA
این جلسه مقدمه ای است بر سروو درایوهای دلتا
ASDA-B2 و دیگری ASDA-A2 یکی
که دو نسل
اصلی از درایوهای سروو دلتا است
که در حال حاضر آن را معرفی می کنیم
و حال خلاصه برنامه امروز، ابتدا
با مقدمه شروع خواهیم کرد
و سپس به طبقه بندی محصولات سروو می پردازیم
و سپس ویژگی ها و مشخصات آنها
برخی از کاربردهایی که می توان
با چندین محصول انجام داد
و از آن به سراغ اطلاعات کاربردی تر خواهیم رفت
مانند نحوه انتخاب
محصولات و برخی لوازم جانبی
و سپس ما تعدادی
تمرین عملی خواهیم داشت
که عمدتا مربوط به
خواهد بود ASDA-soft نرم افزار ما
چند موضوع مانند شناسایی
اطلاعات سروو
نحوه پیکربندی پارامترها برای تنظیم برخی از
ورودی و خروجی های دیجیتال
و همچنین نحوه انجام تنظیمات
و خواهیم دید که تا آن زمان چقدر
خواهیم دید که
چقدر می توانیم در محتوا جلو برویم
پس بیایید مستقیماً به موضوع بپردازیم
بنابراین
سیستم سروو چیست؟
اساساً سروو سیستمی است
که دقیقا دستورات میزبان را اجرا می کند
باشه پس
بنابراین اساساً این یک سیستم حرکتی است
که با اتخاذ موقعیت ،جهت و زاویه
عوامل کنترل جسم
از دستورات هدف پیروی می کند
همانطور که می بینید
این استاد به موتور دستور می دهد
تا به یک موقعیت خاص برود
خوب پس موتور باید در یک امتداد حرکت کند
تا به موقعیت هدف برسد
بنابراین در اینجا برخی از مزایا و
و منافع وجود دارد که می توانیم با
استفاده از محصولات سروو به آنها دست یابیم
بنابراین اولین چیز
موقعیت دقیق خواهد بود
که با محصولات سروو کاملاً راحت است
و این خصلت
موقعیت یابی دقیق دارند و برخی از
کاربردهایی که ما در پایان این ارائه مشاهده خواهیم کرد
بسیار رایج و پرطرفدار است
سرعت بالا خواهد بود
اگر ماشینی را داشته باشیم که در حال حرکت
با سرعت بسیار پایین است
بنابراین دستیابی به موقعیت دقیق
چندان دشوار نیست
خوب تصور کنید که ما می توانیم
به راننده ای
فکر کنیم که که میخواهد ماشینش را پارک کند، اگ ما
بخواهیم از آن شخص که ماشین را
در یک فضای بسیار کوچک پارک کند. اگر او
خیلی آهسته رانندگی کند
حال او می تواند
ماشینش را در جای مناسب پارک کند
بنابراین که در واقع ما
می توانیم در این مورد تصور کنیم که این
مفهوم مانند همان مفهوم محصولات سروو است
با این حال اگر اشیاء، یا
اگر ماشین با سرعت بالا حرکت می کند
و ما می خواهیم ماشین در یک
بسیار دشوار است یا
حتی گاهی غیرممکن است
بنابراین این برای موتور نیز یکسان است
زیرا زمانی که موتور
بار سنگینی را حمل می کند
شاید ماشینی که
به آن متصل شده است بسیار سنگین
یا بسیار بزرگ باشد، بنابراین وقتی هدفمان
موقعیت دقیق می باشد، در سرعت بالا ممکن است
دستیابی به آن موقعیت سخت باشد
با این حال سروو موتورها توانایی
دستیابی به آن را دارند
مزایای استفاده از سروو ها
بنابراین این دو مزیت بزرگی است که
ما به دنبال آن هستیم تا
با محصولات سروو به آن دست پیدا کنیم، بنابراین یکی
موقعیت یابی دقیق
و دیگری سرعت بالا و
سپس مورد بعدی
کنترل زمان واقعی است
همانطور که در بالا می بینیم
سروو یک سیستم است که
همانطور که میزبان دستور می دهد
آن کار را انجام می دهد
بنابراین آنچه بسیار مهم است این است که
ارسال می کند، در اینجا می توانیم
در نظر بگیریم Slave درایو سروو را به عنوان یک دستگاه
خوب هنگامی که دستوری از
میزبان دریافت می کند که باید فوراً پاسخ دهد
بنابراین ما می توانیم مطمئن شویم
که
تا حد امکان تاخیر کمتری وجود دارد
در غیر این صورت، اگر همیشه
هر بار که موتور را نیاز داریم، یک ثانیه
یا حتی بیشتر تاخیر وجود داشته باشد،
تا زمانی که درایو سروو به
فرمان واکنش نشان میدهد
در نهایت این باعث ایجاد یک انحراف
یا تاخیر بین فرمان و
بازخورد می گردد، پس در نهایت
نمی توانیم
به چیزی که دوست داریم دنبال کنیم یعنی
موقعیت یابی دقیق برسیم
این کنترل بلادرنگ
مهم است و چون سروو
این توانایی را دارد
که به فرمان واکنش فوری نشان دهد
پس این همان چیزی است که ما نیز
به دنبال آن هستیم
و سپس مورد بعدی توانایی بالا
یا پایین خواهد بود
انتخاب سروو مناسب
بسیار خوب، هنگامی که ما محصولات سروو را
برای کار انتخاب می کنیم، آنچه بسیار مهم است
این است که باید بدانیم
که برای موتور به چه مقدار قدرت
نیاز داریم
برای به حرکت درآوردن ماشین
باید مطمئن شویم که
موتور به اندازه کافی قدرتمند است
در غیر این صورت ممکن است که
موتور نتواند
دستگاه را راه اندازی کند و در نهایت
ممکن است نزدیک به زنگ هشدار باشد
یا حتی به محصولات آسیب برساند
که گشتاور تولید شده از موتور
کافی است
با این حال با گشتاور بالاتر که
به معنای
رتبه های قدرت بالاتر است به این معنی است که
نه تنها ابعاد
بلکه هزینه های موتور و
سروو درایو نیز، افزایش خواهد یافت
اما در تمام زمان و پروسه یک کار
نیاز نیست
همیشه آنقدر گشتاور داشته باشیم
ما فقط به
گشتاور بیشتر، در حین شتاب یا
کاهش سرعت، نیاز داریم
بنابراین در یک حرکت چرخه کامل
شاید باید بگوییم این بخش فقط برای
شاید 20 در صد فرآیند است
بنابراین اگر ما نیاز به
یک موتور بزرگتر داریم
موتور رده بالاتر
فقط برای آن 20 درصد از
کل چرخه حرکت است
بنابراین شاید اگر ما در مورد
این نسبت هزینه و عملکرد صحبت می کنیم
ارزش آن را
نداشته باشد
راهکار استفاده از موتور با گشتاور بالا
بنابراین در این حالت ممکن است
موتوری با توان کمتر انتخاب کنیم
در عین حال با
قابلیت تحمل اضافه بار بالا
High Overload Capability
که موتور بتواند گشتاور بیشتری تولید کند
فرض کنید شاید 200 یا 300
آنگاه باز هم
کافی خواهد بود
برای مدیریت کل سیستم
بنابراین در این صورت مجبور نیستیم
موتور را بزرگ کنیم
اما همچنان می توانیم کل سیستم را
به درستی مدیریت کنیم
خوب، مورد بعدی
پس بیایید در مورد ساختار سیستم
در داخل سروو سیستم صحبت کنیم
پس اول از همه مطمئن باشید که
ما باید یک درایو سروو داشته باشیم
و سپس شما باید یک موتور سروو با
با انکودر داشته باشید
پس انکودر، چکاری را انجام می دهد؟
و این چیزیست که
آن را بعدا توضیح خواهم داد اما
بطور ساده
انکودر دستگاهی است که
از آن می توانید برای
انتقال بازخورد موقعیت به درایو سروو استفاده کنید
به طوری که درایو سروو می تواند
موقعیت موتور را
در حال حاضر تشخیص دهد و ببیند که اگر
انحراف زیادی وجود دارد
باید که جبران شود یا در درصورتیکه بطور درست
از فرامین پیروی می کند
فقط به کار خود ادامه دهید
سپس مورد بعدی این است که شاید ما
چیزی شبیه گیربکس داشته باشیم
بسیار خوب گیربکس، می تواند به تولید گشتاور
بیشتر کمک کند، بنابراین اگر نمیخواهیم
موتور را بزرگتر کنیم، این نیز می تواند
یک گزینه باشد
مقداری لوازم جانبی است
خوب پس ما هم مثل شما به کابل نیاز خواهیم داشت
بنابراین همانطور که می توانید در اینجا ببینید
ما کابل انکودر را داریم که به
انکودر وصل شده است
و کابل برق که
خروجی اصلی از درایو سروو را
به موتور متصل کرده است
و همچنین دارای کانکتورهایی برای
ترمینال های مختلف است که برای
اهداف مختلف مورد کاربرد دارد
و سپس این یک ساختار بسیار ابتدایی سروو
یا سروو سیستم است
و اگر می خواهید، آن را با دستگاه های بیشتری ادغام کنید
داشته باشیم I/O پس از آن ما می توانیم چیزی شبیه به ماژول
بنابراین می توانیم از آن برای سیم کشی
ورودی / خروجی، دیجیتال / آنالوگ استفاده کنیم
و همچنین می توانیم چند
داشته باشیم (Regenerative Resistor) مقاومت احیا کننده
به طوری که وقتی موتور در حال ترمز باشد یا
اگر چیز غیر منتظره ای وجود داشته باشد
اگر مقداری توان ورودی غیرمنتظره بالا وجود دارد
می تواند از طریق این مقاومت
و با این مجموعه تلف شود
با حرکت بیشتر رو به جلو ما می توانیم تعدادی بیشتر
از دستگاه های جانبی داشته باشیم
خوب مثلا ما می توانیم آن را به یک
PLC
متصل کنیم ، HMC یا به یک یا کنترل کننده حرکت
که در واقع این یک کنترل کننده ماشین انسانی است متصل کنیم
متاسفم توضیحیات بیشتر را
اینجا ارائه نمیکنیم، اما بله
فکر میکنم که همه شما
با آن آشنا هستید
پس به طوری که همه اینها میتواند مانند
یک میزبان یا استاد کار در نظر گرفته شوند
خوب پس آنها دستورات را
به درایو سروو ارسال می کنند
بنابراین در این مورد درایو سروو
کار می کند Slave به عنوان یک دستگاه
بنابراین درایو سروو شما فرامین را دریافت خواهید کرد و
سپس موتور را در موقعیت مناسب
با سرعت مناسب قرار می دهد
و سپس اگر بخواهیم به سمت بیش از
یک هدف حرکت کنیم
میتوانیم ببینیم که احتمالا یک کابینت داریم
حال ما قسمتی را خواهیم دید که
همه دستگاهها را با هم ترکیب میکند
HMI مثل اینجا ما یک
و سوئیچهای اینترنت داریم plc چند
که آنها می توانند با درایو سروو
ارتباط برقرار کنند و دستوراتی را ارسال کنند
CANopen یا شاید دستورات از طریقی مانند
یا چیزی شبیه به یک Modbus یا مثلا
EtherCAT
بله، همه اینها
گزینه های ممکن هستند، بنابراین اکنون اجازه دهید که
به محصولات سروو دلتا، برویم
همانطور که می بینید که ما ابتدا
را در سال 2004 داریم ASDA-A اولین سری از محصول
ما به توسعه سری های جدید ادامه دادیم و
در حال حاضر حداقل دو
ASDA-A2 و ASDA-Aسری 2
آنهایی هستند که ما به معرفی آنها می پردازیم و
سپس این برگه محصولات است که در اینجا
میتوانیم ببینیم، اینجا ما یک معیار داریم که
معیار افقی به عنوان
و عمودی به عنوان یک
توانایی پاسخگویی می باشد
بنابراین اگر فقط به این دو سری نگاه کنیم
که ما عمدتاً در این برنامه معرفی می کنیم بنابراین
در این قسمت و A2 می توانیم ببینیم
که کمی پایین تر دیده می شود B2
خوب، پس چرا ما
می خواهیم از پارامترهای دقت انکودر
و توانایی پاسخگویی به عنوان معیاری برای
برای توصیف محصولات سروو ی خود استفاده کنیم
بنابراین همانطور که قبلاً اشاره کردم
دو مزیت عمده وجود دارد
و هدفی که می خواهیم
موقعیت یابی دقیق
و دیگری سرعت بالاست
بنابراین برای موقعیت یابی دقیق
همانطور که اشاره کردیم انکودر
دستگاهی است
که برای خواندن بازخورد (فیدبک) موقعیت
و ارسال آن به درایو سروو استفاده می شود
بنابراین به این معنی است که
انکودر یا رزولیشن انکودر
مستقیماً بر اینکه
چقدر و با چه دقتی می توانیم
موقعیت را ایجاد و بهینه کنیم تأثیر می گذارد
مثلا حدود 2500
پالس در هر دور داشته باشیم و
در مقایسه با
انکودری که رزولیشن 100,000 پالس در هر
دور دارد
بنابراین مطمئناً
انکودر با وضوح بالاتر می تواند
موقعیت بهتری را ایجاد کند
خوب پس به همین دلیل است که ما از این مورد
به عنوان یکی از معیارها، استفاده می کنیم
معیار دیگر برای دسته بندی محصولات سروو
به عنوان یک معیار دیگر
توانایی پاسخگویی است
بنابراین توانایی پاسخگویی که می توانیم به آن فکر کنیم
چگونه می توانند به فرمان
واکنش نشان دهند
بنابراین اگر بتواند با بیشترین
سرعت ممکن به دستور واکنش نشان دهد
به این معنی است که تاخیر کمتری داریم
و بنابراین تاخیر کمتر به این معنی است که
احتمال بیشتری وجود دارد که
بتوانیم به
موقعیت مناسب
با سرعت بسیار بالا
در زمان مشخص شده دقیق، دست یابیم
خوب پس به همین دلیل است که ما از معیار
توانایی پاسخگویی استفاده می کنیم
که بعداً به عنوان
و رزولیشن انکودر در مورد آن صحبت خواهیم کرد
این دو شاخص
وقتی نوبت به دستهبندی محصولات
سروو می رسد، بیان می شوند
بنابراین در اینجا همانطور که میبینید، اجازه دهید
شروع کنیم ASDA-B2 با
B2 بنابراین برای
رزولیشن انکودر یا بالاترین وضوحی
که می تواند پشتیبانی کند 17 بیت است
و پهنای باندی که
که پاسخگو می باشد
برابر 550 هرتز می باشد
از نظر توان
از 100 وات شروع می شود
و می تواند به سه کیلووات برسد
ASDA-B2 و همانطور که برای
A2 می توانیم ببینیم
از رزولیشن انکودر بالاتری پشتیبانی می کند
که در اینجا 20 بیت است
و همچنین پهنای باند بالاتر آن، می تواند به یک کیلوهرتز برسد
و برای رتبه بندی توان از 100 وات شروع می شود
است B2 که همانند همان
با این حال می تواند تا 15 کیلووات برسد
خوب پس اساساً می
توان به راحتی گفت که
سری پیشرفته تری A2
می باشد B2 از
پس بیایید نگاهی به این جدول بیاندازیم
این محصولات طبقه بندی شده ما است
بنابراین در حال حاضر، از آنجایی که ما
را معرفی می کنیم B2 و A2 عمدتا
خوب بقیه اش مربوط به بحث ما نیست
یا آنها را ارائه نمی کنیم
یا قبلا از رده خارج شده اند. بنابراین اجازه دهید ما
فقط بر روی
همین دو سری تمرکز کنیم
پس اول از همه توان ورودی خواهد بود
بسیار خوب، پس برای توان ورودی
ما دو سری داریم
ac یکی 220 ولت
و یا 380 است
اما این نیز رایج است که
بشنوید که مردم می گویند
خوب پس ما یک سری 200 ولت داریم یا
سری 400 ولت
خوب ، اساسا شبیه هم هست
نیز شرایط یکسان است و A2 برای
از هردو این توان های ورودی را پشتیبانی می کند
اگر توان مصرفی کمتر از 1.5
کیلووات باشد
آنگاه تک فاز و سه فاز هرکدام
ممکن است
اما اگر توان مصرفی
برابر یا بیشتر از دو کیلووات باشد
و یا به بالا رفتن ادامه دهد، سپس
میتوان گفت که باید سه فاز باشد
البته این برای 220 ولت است اما اگر برای 380 باشد
حال داشتن سه فاز در اینجا
اجباری است
و سپس برای رزولوشن انکودر
همانطور که می دانید
معادل 20 بیت و A2 برای
پهنای باند آن
که می تواند تا یک کیلوهرتز برسد و
سپس می توانید
مجموعه خروجی ورودی دیجیتال و خروجی
ورودی آنالوگ را اینجا ببینید
و سپس برای فرکانس فرمانهای پالسی
که درایور سروو می تواند شناسایی کند
این (O.C.) بنابراین برای کلکتور باز
بیشترین است
که نشان دهنده L.D. میزانی است که می تواند از آن پشتیبانی کند و
است (Line Driver) درایو خطی
که یک سیگنال متفاوت دارد، سپس خواهیم دید
که سرعت انتقال داده بالاتری دارد
و در مورد رابط ارتباطی
پشتیبانی می کنیم MODBUS اکنون ما از A2 بله برای
R232/485 جهت
استفاده کنیم usb ما می توانیم از یک پورت
جهت برقراری ارتباط با کامپیوتر برای
استفاده از نرم افزار برای پیکربندی برخی پارامترها
CANopen و همچنین ما پروتکل های
را داریم EtherCAT و
در صورتیکه در کاربردها به
نیاز داشته باشند Fieldbus ارتباط از طریق
و سپس آن زیر سه قسمت آخر
PR که در اینجا می توانید ببینید حالت
حلقه بسته کامل
یکپارچه می باشند E-Cam و
این توابع حرکتی از پیش تعریف شده
A2 به سروو دلتا آدرس دهی می کنند، بنابراین برای
همیشه
به این سه تابع مجهز هستند
برویم B2 و سپس اگر به
B2 میبینیم
فقط در سری 220 ولت
وجود ندارد
و در آینده نیز چنین چیزی وجود نخواهد داشت
خوب، اساساً برای توان ورودی
است A2 مشابه همان
و سپس در رزولیشن و پهنای باند
می باشد a2 کمتر از
در ورودی خروجی دیجیتال و ورودی خروجی آنالوگ
که شما می توانید آن اعداد را اینجا ببینید و
سپس برای بقیه موارد نیز می توانید نگاهی بیندازید
و سپس ما می توانیم به خوبی
ببینیم B2 آنها را برای
اما با این سه
تابع اساسی همراه نیست
را ندارند PR بنابراین حالت
هیچ حلقهی بستهشدهای وجود ندارد
یکپارچه ای وجود ندارد E-Cam و همچنین هیچ
بنابراین به طور کلی می توانیم ببینیم
همانطور که قبلاً اشاره کردم
مدلی پیشرفته تری است A2

یک نظر
تعقيب: آموزش آنلاین - درایو های سروو دلتا - soha tech cnc