سروو های هیبریدی در مقایسه با سرووهای استاندارد :
نوع جدیدی از سروو موتورهای هیبریدی یکپارچه در مصارف دایرکت درایو (درایو مستقیم) مورد استفاده قرار می گیرند . که قیمت کمتر ، اندازه کوچکتر و راندمان بالاتری نسبت به سروو موتورهای معمولی ارائه می دهند.
هیچ موتوری، در واقع به تنهایی برای همه کاربرد ها ایده عال نیست.
در کاربردهای دایرکت – درایو از سرووهای هیبریدی استفاده می شود. در حالیکه در کارهایی که نیاز به سرعت بالا وجود دارد ، از سروو های معمولی استفاده می گردد.
استفاده از یک سروو معمولی در یک کاربرد دایرکت – درایو ممکن است تا یک سوم راندمان کمتری را ایجاد نماید. و شاید تنها 40 درصد از توان مصرفی را در سرعت معمول مورد نیاز فراهم کند. این امر موجب اتلاف حرارتی معادل 160 تا 450 درصدی بیشتر ، توسط سروو موتور معمولی در مقایسه با سروو موتور هیبریدی یکپارچه با استاندارد NEMA 23 (با فلنچ 2.3 اینچی) و طول 4 اینچ ، نسبت به سروو موتور های معمولی با همین ابعاد می گردد.
انواع مختلفی از سروو موتورهای یکپارچه وجود دارد
سرووهای رایج، با موتورهای بدون براش (براشلس) AC و با تعداد قطب پایین،
و سرووهای هیبریدی که از موتورهای بدون براش AC با تعداد قطب بالا استفاده می کنند. که این مدل موتورها ممکن است بصورت حلقه باز به عنوان استپر موتور نیز استفاده گردند.
همانطور که در این مقایسه استفاده می شود، سروو موتورهای هیبریدی یکپارچه، به عنوان سروو موتورهای واقعی با استفاده از درایوهای برداری (vector drives) عمل می کنند.
این مقایسهها برای درایوهای استپ موتور که در مود پیشگیری از از دست دادن استپ (step-loos) هستند صدق نمیکند، حتی اگر از همان سبک موتور استفاده شود .
این تفاوت عملکرد حلقه بسته در برابر حلقه باز در مورد موتورهای با تعداد قطب پایین نیز صدق می کند.
یک موتور هنگام استفاده از یک سروو کنترلر کامل ، در مقایسه با همان موتور در زمانیکه با یک درایو با سرعت متغییر هدایت می شود ، عملکرد به مراتب بهتری را ارئه می نماید.
تفاوت های ساختاری موتورها
سروو موتورهای هیبریدی بر پایه موتورهایی با تعداد قطب بالا (معمولاً 100 قطبی) هستند که عموما در هنگام کار با حلقه باز به آنها استپر موتورگفته می شود.
سروو موتورهای سنتی معمولاً از موتورهای با تعداد قطب پایین (معمولاً 4 تا 16 قطب) استفاده می کنند.
با توجه به یکسان بودن سایر عوامل موتور، ثابت گشتاور (Nm/A) برای یک موتور با تعداد قطب ها افزایش می یابد و سرعت نیز به همان نسبت کاهش می یاب. ثابت گشتاور (اگر تلفات به طور جداگانه محاسبه شود) با ثابت ولتاژ برابر است که به صورت ولت/رادیان/ثانیه بیان می شود.
در این مثال مقایسه سروو موتور یکپارچه برند “A” ثابت ولتاژ را V/1000 RPM 6.6 ذکر می کند که مربوط به V/Radian/sec 0.06 است که همچنین برابر 0.06 نیوتن متر در آمپر، و مقاومت سیم پیچی 1.1 اهم است. سروو هیبریدی مجتمع QuickSilver دارای ثابت ولتاژ V/Radian/Sec 0.227 و مقاومت سیم پیچ 0.66 اهم است.
این بدان معناست که یک سروو معمولی در مقایسه با یک سروو هیبریدی ، جهت تولید گشتاوری یکسان در شفت ، نیاز به بیش از 3.5 برابر جریان بیشتر دارد.
تلفات برق در سیم پیچ های مسی توسط Ploss = I2R محاسبه می شود.
توان مورد نیاز در هنگام توقف این گشتاور ، بیش از 20 برابر قدرت همان گشتاور می باشد، که در هنگام توقف تلف می شود.
بنابراین، ثابت گشتاور بالا در سرعت های پایین تا متوسط مفید است.
همچنین ، ثابت گشتاور بالا همچنین باعث افزایش EMF (میدان های الکتریکی و مغناطیسی) برگشتی موتور برای یک سرعت معین می شود، که در سرعت های بالاتر ولتاژ موجود برای جریان درایو را به موتور کاهش می دهد.
این شرایط حداکثر سرعت موتور را محدود می کند. این تفاوتها باعث میشود سروو موتور هیبریدی برای بسیاری از کاربردهای دایرکت – درایو مفید باشد، اما استفاده از آنها را در کاربردهایی با سرعت بالا که در آن موتورها با تعداد قطب پایینتر بهینه ترند را، محدود می نماید.
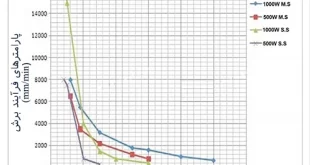
مقایسه نموداری :
نگاهی به منحنی های گشتاور برای دو نوع موتور نشان دهنده خیلی از مسائل می باشد.
منحنیها نشان میدهند که سروو هیبریدی دارای گشتاور بالاتری نسبت به گشتاور پیوسته A (“A” Cont. Torque) تا حدود rpm 2000 است و همینطور گشتاور بیشتری نسبت به پیک گشتاور A (“A” Peak Torue) تا حدود RPM 1500 دارد.
اینها سرعتهای مهمی برای کاربردهای نیازمند به دایرکت – درایو می باشد. که در آن، موتور مستقیماً بار را بدون چرخ دنده هدایت می کند.
یک لیداسکرو معمولی (¼ اینچ، طول 24 اینچ، هر دو انتهای آن با یک یاتاقان ثابت شده است) دارای سرعت بحرانی تقریباً 1600 RPM است، در حالی که اگر طول لیداسکرو را تا 36 اینچ برسانیم ، سرعت بحرانی را به بیش از 700 RPM کاهش می دهد.
یک درایو تسمه ای دایرکت – درایو معمولی (قرقره با قطر 1 اینچ = 3.14 اینچ در دور) با سرعت 52 اینچ در ثانیه حرکت می کند در حالی که با سرعت 1000 دور در دقیقه می چرخد.
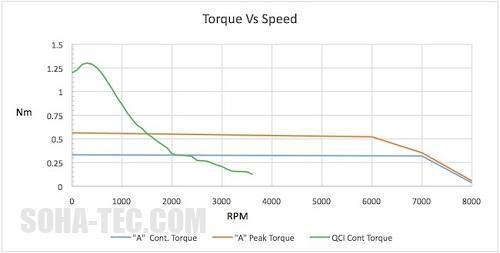
منحنی گشتاور-سرعت، گشتاور سروو موتور هیبریدی و سروو موتور معمولی را مقایسه میکند و نشان میدهد که موتور هیبریدی در سرعت های پایین ، گشتاور پیوسته بیشتری دارد.
نمودار توان خروجی – سرعت
نشان می دهد که سروو هیبریدی تقریباً از 700 دور در دقیقه تا نزدیک به 1500 دور در دقیقه قدرت ثابتی دارد که همچنان نیازهای کاربردی در دایرکت – درایو را پوشش می دهد.
این بدان معنی است که سرعت را می توان در این محدوده انتخاب کرد و همچنان از قابلیت های موتور به طور کامل استفاده نمود.
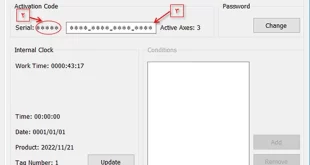
بطور پیش فرض ، داده های سروو ها نشان میدهد که از 7000 rpm برق را قطع می کند. اما این بخش ها، برای قرارگیری و جایگیری در نمودار برییده شده اند.
در حالی که توان پیوسته موتور A در سرعت های بالاتر تا 226 وات افزایش می یابد، توان پیوسته در 1000 rpm فقط 35 وات است، در مقایسه با سروو های هیبریدی QCI-X23C-3 ، که توان پیوسته آن برابر با 90w است.
بنابراین تعیین نوع موتور ترجیحی ، قطعاً بستگی به کاربرد مورد استفاده موتور دارد.
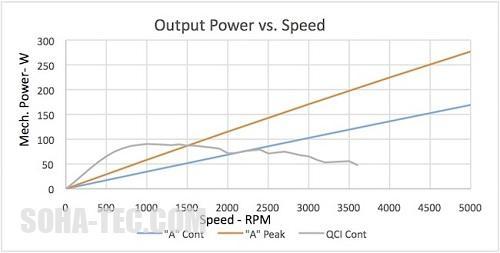
این نمودار توان خروجی – سرعت، توان ثابت بیشتری را در سرعتهای پایینتر نشان میدهد، که آن را برای کاربردهای دایرکت – درایو مناسبتر میکند.
نمودار راندمان – سرعت
راندمان موتور برای سروو هیبریدی QuickSilver مستقیماً اندازهگیری می شود.
در حالی که راندمان سروو معمولی بر اساس گشتاور و تلفات I2R و تلفات مربوط به سرعت تخمین زده شده و همچنین جریان ورودی 6.6 آمپر در 48 ولت با تولید 0.33 نیوتن متر تخمین زده شد. در 6500 دور در دقیقه (226 وات خروجی، 318 وات ورودی، حدود 92 وات به عنوان گرما دفع می شود).
با نمودار گشتاور پیوسته بر اساس دمای مرجع 85 درجه سانتیگراد، توان تلف شده توسط موتور برای این محاسبات، تقریباً بصورت مداوم در محدوده سرعت در نظر گرفته شده است.
آنچه به آسانی مشهود است تا حدود سرعت 3200 دور در دقیقه ، سروو موتور هیبریدی و کنترلر به طور قابل توجهی کارآمدتر از سروو موتور معمولی می باشند.
در رنج میانی و در 1000 دور در دقیقه، در بسیاری از کاربردهای دایرکت – درایو، عملکرد سروو هیبریدی، 225 درصد کارآمدتر از عملکرد مداوم سروو موتور معمولی است و در مقایسه با پیک نمودار گشتاور موتورهای کم قطب معمولی، حدود 300 درصد کارآمدتر است. (در حالیکه هنوز هم تنها حدود 64 درصد از گشتاور سروو هیبریدی را تولید می کند). باز هم، طیف وسیعی از سرعت عملیات با راندمان بالا برای سروو موتور هیبریدی وجود دارد.
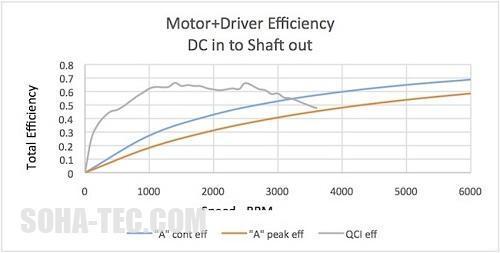
نمودار راندمان در مقابل سرعت نشان می دهد که سروموتور هیبریدی و کنترلر به طور قابل توجهی کارآمدتر از سروموتور معمولی تا حدود 3200 دور در دقیقه هستند.
در اینجا، نمودار تا حدودی کوتاه شده است تا بتواند رنج سرعت دایرکت درایو را نشان دهد. سیستم A در نهایت در نقطه توان نامی پیوسته 6500 rpm به بازده 71% می رسد. اگرچه ممکن است برای کاربردهایی که واقعاً به این سرعت نیاز دارند مفید باشد، اما برای اکثر کارایی های دایرکت – درایو قابل دسترسی نیست.
راندمان در سرعت صفر:
اگرچه هر دو نوع موتور بازدهی صفر در سرعت صفر دارند، سیستم سروو هیبریدی برای نگه داشتن بار 1.2 نیوتن متری در حالت توقف تنها 20 وات نیاز دارد.
مقابل آن در سروو معمولی، برای نگه داشتن در 0.31 نیوتن متر، 90 وات تخمین زده می شود و 250 وات برای حداکثر گشتاور نگهدارنده 0.56 نیوتن متر در هنگام توقف تخمین زده می شود.
این تفاوت در فیکس کردن وسایل، گیره ها، بارهای عمودی و بارهای مشابه که بخش قابل توجهی از زمان خود را همراه با گشتاور بصورت ثابت هستند ، مهم است.
کاربردهای دایرکت – درایو بصورت معمول
بسیاری از کاربدهای دایرکت – درایو به سرعت موتور بین 250 تا 2000 RPM نیاز دارند.
به عنوان مثال، پمپ های جابجایی مثبت با پیستون مستقیم برای تحویل دقیق معمولاً در محدوده 250 تا 500 دور در دقیقه هستند، در حالی که درایوهای تسمه 200 تا 1000 دور در دقیقه هستند.
لید اسکروها معمولاً از 500 تا 1500 دور در دقیقه برای طیف گستردهای از کاربردها متغیر هستند، با سرعتی که نه تنها توسط سرعت بحرانی (رزونانس اول) لیداسکرو محدود میشود، بلکه با رتبه سرعت مهره لید اسکرو نیز محدود میشود، که اغلب میتواند سرعت را محدود کند، حتی در لیداسکرو های کوتاه.
موتورهای مورد استفاده برای سرووهای هیبریدی بر پایه استپر موتورها می باشند.
این طراحی ها از مقدار قابل توجهی کمتر از مواد مغناطیسی استفاده می کنند و معمولاً آهنربا تک (با یک موتور 3 لایه (Stack) بلند، که 3 آهنربا دارد) به صورت محوری با روتور تراز می شود و نصب آسانی را انجام می دهد که نیازی به تراز و سنگ زنی دقیق ندارد.
اگرچه تعداد قطب ها زیاد است، آهنربایی منفرد با طراحی هوشمندانه جهت همه قطب های روتر به اشتراک گذاشته شده است .
این موتورها همچنین موتورهای آهنربای دائم داخلی (IPM) هستند، این یک فناوری است که به تازگی برای سرووهای رده بالا و موتورهای با راندمان بالا مورد استفاده قرار میگیرد.
استفاده از طراحی IPM امکان استفاده از روشهای تضعیف میدان را فراهم میکند، که اجازه میدهد حداکثر توان و راندمان محدوده سرعت افزایش یابد.
روشهای تضعیف میدان همچنین اجازه میدهند که سرعت نهایی موتور (البته با گشتاور کاهشیافته) فراتر از آن چیزی باشد که معمولاً موتور را متوقف میکند.زیرا back-EMF (نیروی محرکه الکتریکی معکوس) بیش از ولتاژ درایو است. با توجه به تعداد قطب های بیشتر، فرکانس کموتاسیون برای این موتورها به طور قابل توجهی بیشتر از موتورهای با شمارش قطب پایین است، اما افزایش سرعت در پردازنده های سیگنال دیجیتال(DSP) این مشکل را کمتر کرده است.
گشتاور پیوسته بالا ارائه شده توسط موتور با تعداد قطب بالا به موتور این امکان را می دهد که در بسیاری از کاربردهای دایرکت – درایو بدون نیاز به سری چرخ دنده، برای تطبیق سرعت موتور با سرعت کاربرد، به حداکثر توان خود برسد. این بدان معناست که توان نامی واقعی را می توان در سرعت مورد نیاز استفاده کرد.
مثال:
استفاده از یک موتور با سرعت بالاتر در یک کاربرد معمولی دایرکت – درایو به معنای خرید یک موتور و درایور 200 وات است و سپس فقط میتوانید 30 یا 40 وات را به برنامه وارد کنید یا یک گیربکس اضافه کنید .(که با استفاده از آن اندازه و هزینه افزایش می یابد و قابلیت اطمینان کاهش می یابد، در اینصورت معیارهای مقایسه بطور جدی تغییرمی کند).
تطبیق پذیری مناسب با توجه به مشخصات سرعت موتور، با بار مورد نیاز به طور قابل توجهی مصرف برق و گرمای هدر رفته ناشی از آن را کاهش می دهد.
این نتیجه ممکن است غیر شهودی باشد. وقتی سروو سنتی را در نظر می گیریم، انتظار می رود که راندمان بالایی داشته باشد. اما این راندمان بالا فقط در محدوده باریک نزدیک به سرعت عملیاتی بهینه آن موجود است. (راندمان زمانی که کمتر از آن سرعت کار می کند، بسیار کمتر است.)
همچنین به خاطر داشته باشید، درواقع ممکن است که برای کاربردهای موقعیت یابی، توان نگهداری مورد نیاز ، بر کل گرمایش غالب باشد.
مقایسه کلی و بررسی مزایا و معایب سروو های هیبریدی در مقایسه با سروو های معمولی و استپر موتورها
همانطور که در جدول زیر مشاهده می فرمائید. سروو های هیبریدی شامل فواید استپر موتور ها و سروو موتورها و همچنین بسیاری از مزایای دیگر در یک پکیج می باشند.
در حالیکه بسیاری از ضعف ها و موارد منفی مربوط به استپر موتورها و سروو موتورها را شامل نمی گردند :

| تکنولوژی سروو موتور | تکنولوژِی حرکت هیبریدی | تکنولوژِی استپر موتور | ||
|---|---|---|---|---|
| موارد منفی | فواید | فواید | فواید | موارد منفی |
| • نیاز به تیون کردن | • حداکثر گشتاور | • جریان/گشتاور متغیر | • حرکت یکنواخت | • از دست دادن همگام سازی / استال (ایستایی) |
| • سطح قیمتی بالا | • سرعت بالا | • کنترل در لحظه واقعی | • گشتاور بالا در هنگام استارت و سرعت پایین | • مارجین گشتاور 50% |
| • خطا در کار | • حالت گشتاور | • گشتاور بهینه در تمام سرعت ها | • مقرون به صرفه | • تصحیح حرکت پست |
| • پیچیدگی بالاتر | • حلقه بسته | • مصرف انرژی کمتر | • بدون نیاز به تیون کردن | • گشتاور/جریان ثابت |
| • لرزش سروو | • عدم هماهنگی را از بین می برد | • سفتی در حالت سکون | • گرمایش بیش از حد | |
| • هرگز کنترل عملکردی موتور را از دست نمی دهد | ||||
| • کاهش گرمایش موتور |
منابع
مفید بود؟
0%
با امتیازدهی به مطالب به ما در بهبود سایت خود کمک نمایید.